About project
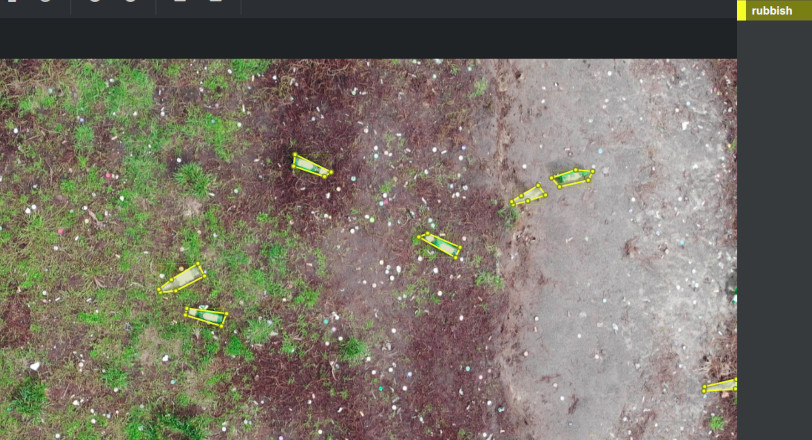
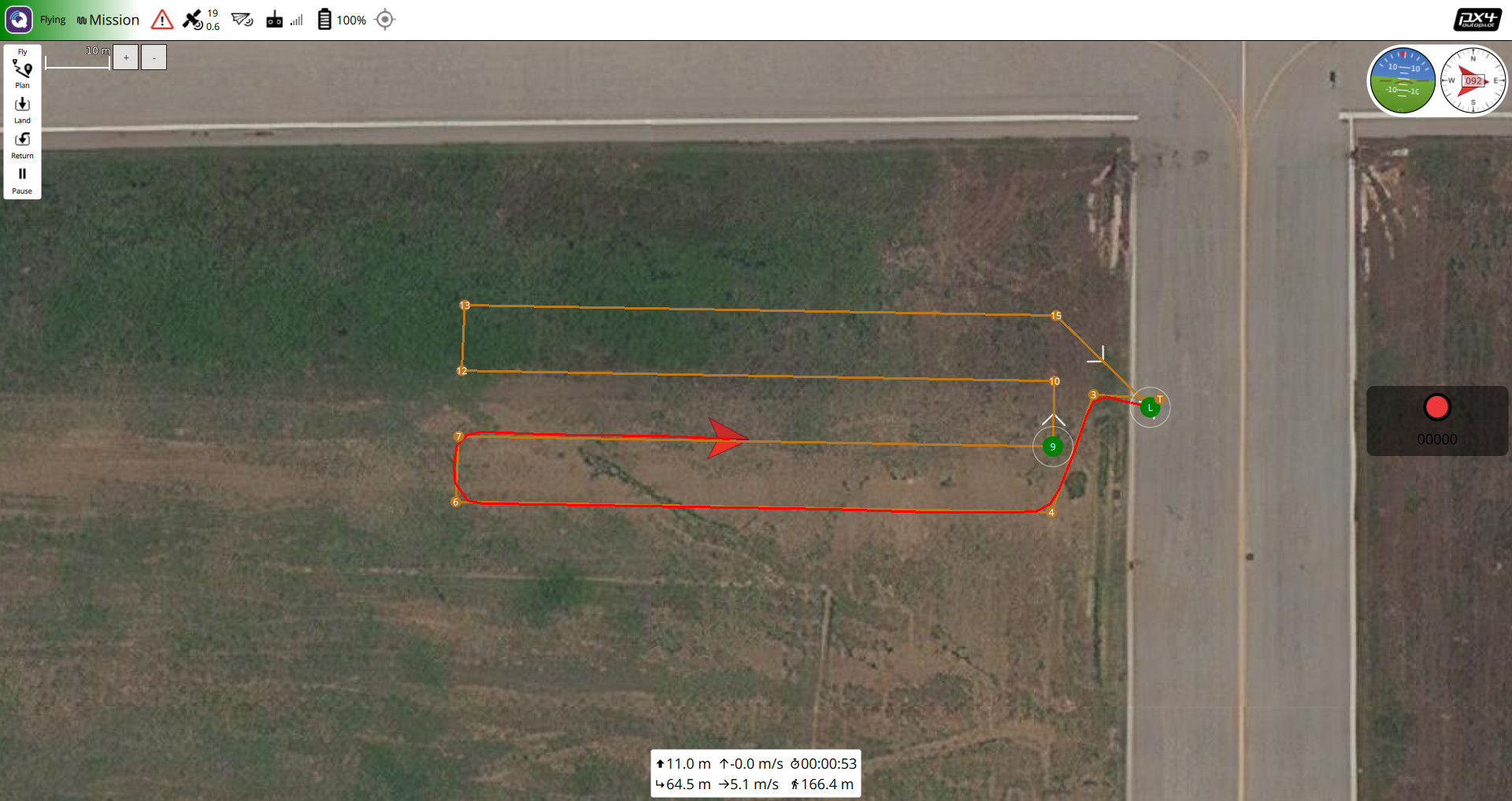
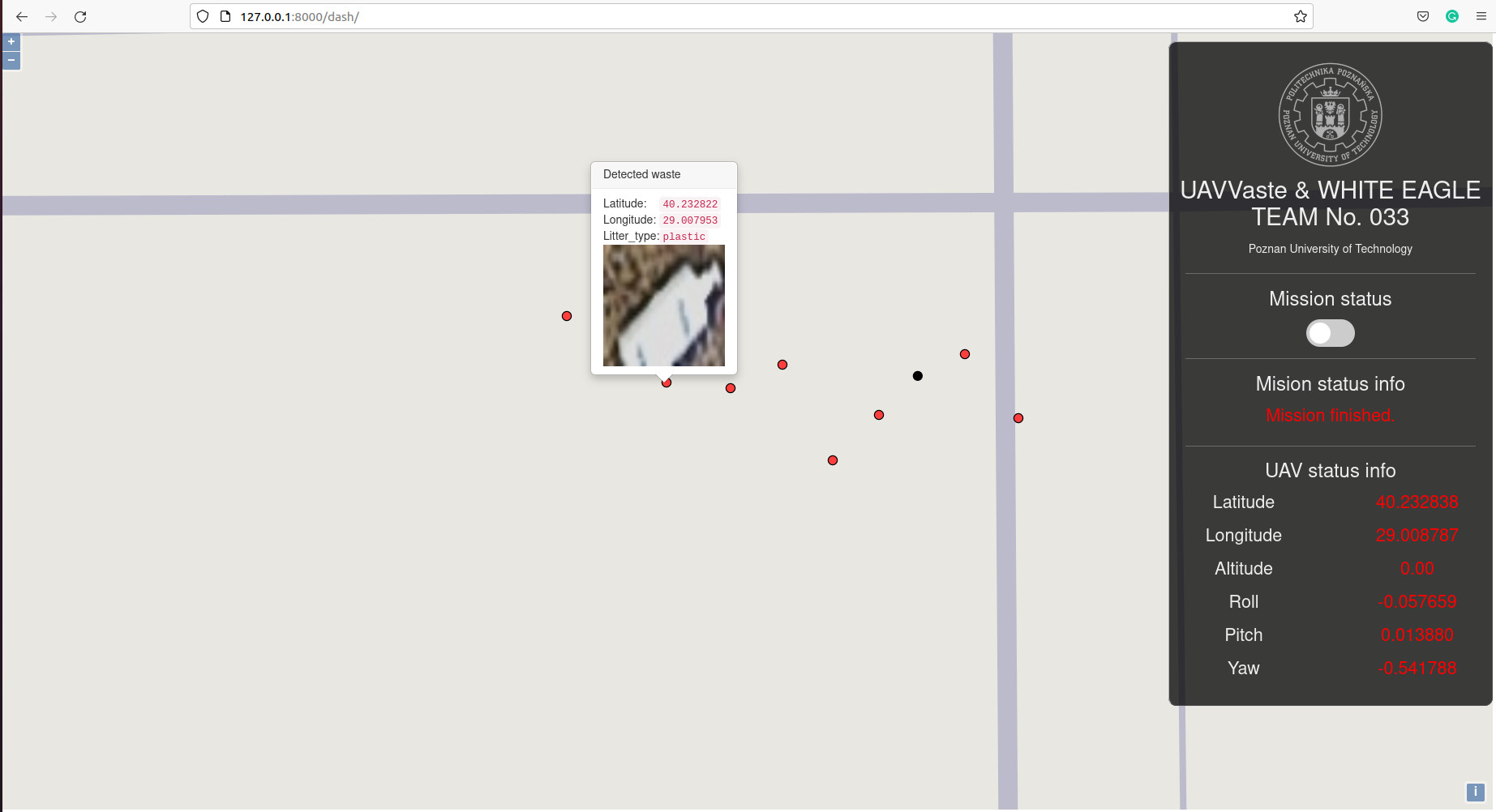
Using an unmanned aerial vehicle (UAV) equipped with a GPS locator and performing a flight along a given route (automatically or manually controlled), we locate abandoned waste in a given area. The extension of GPS data with a high-resolution vision system provides a highly accurate location. The observation from above and the ability to quick, unlimited movement of the UAV make the map obtained in a very short time. The designated waste location points can be transferred to a cleaning team or an autonomous robot, additionally planning their route so as to minimize cleaning time and workload.